Rapid is a student team at UBC. The group designs and maintains rapid prototyping technologies such as 3D printers. I have been a member of Rapid since first year of university. I am currently in a team of five that is working to build a 3D scanner.
Rapid is a student team at UBC. The group designs and maintains rapid prototyping technologies such as 3D printers. I have been a member of Rapid since first year of university. I am currently in a team of five that is working to build a 3D scanner.
Our hardware design follows some of the ideas used in our design project "The Ray". The frame is made from interlocking, laser-cut hardboard for cheap and easy manufacture. Metal rods are used to allow for fine tuning in the positioning of the cameras. A Raspberry Pi model 3 functions as the central control unit, interfacing the stepper, cameras, laser and memory-export.
When plugging in a memory-stick, a scan starts automatically. The scanner cameras take two pictures of the object (one with the line laser on and one with it off) for each position. A stepper-motor rotates the turn-table with a potential resolution of 0.2 degrees per step. The images are written directly to the memory-stick and taken to the computer for post-processing.
We have run successful image captures, but we require greater consistency of timing and camera exposure for the generated point cloud to be of a satisfactory quality. Work is therefore currently being put into converting the Python code to lower levels where we have greater control of timing and camera settings.
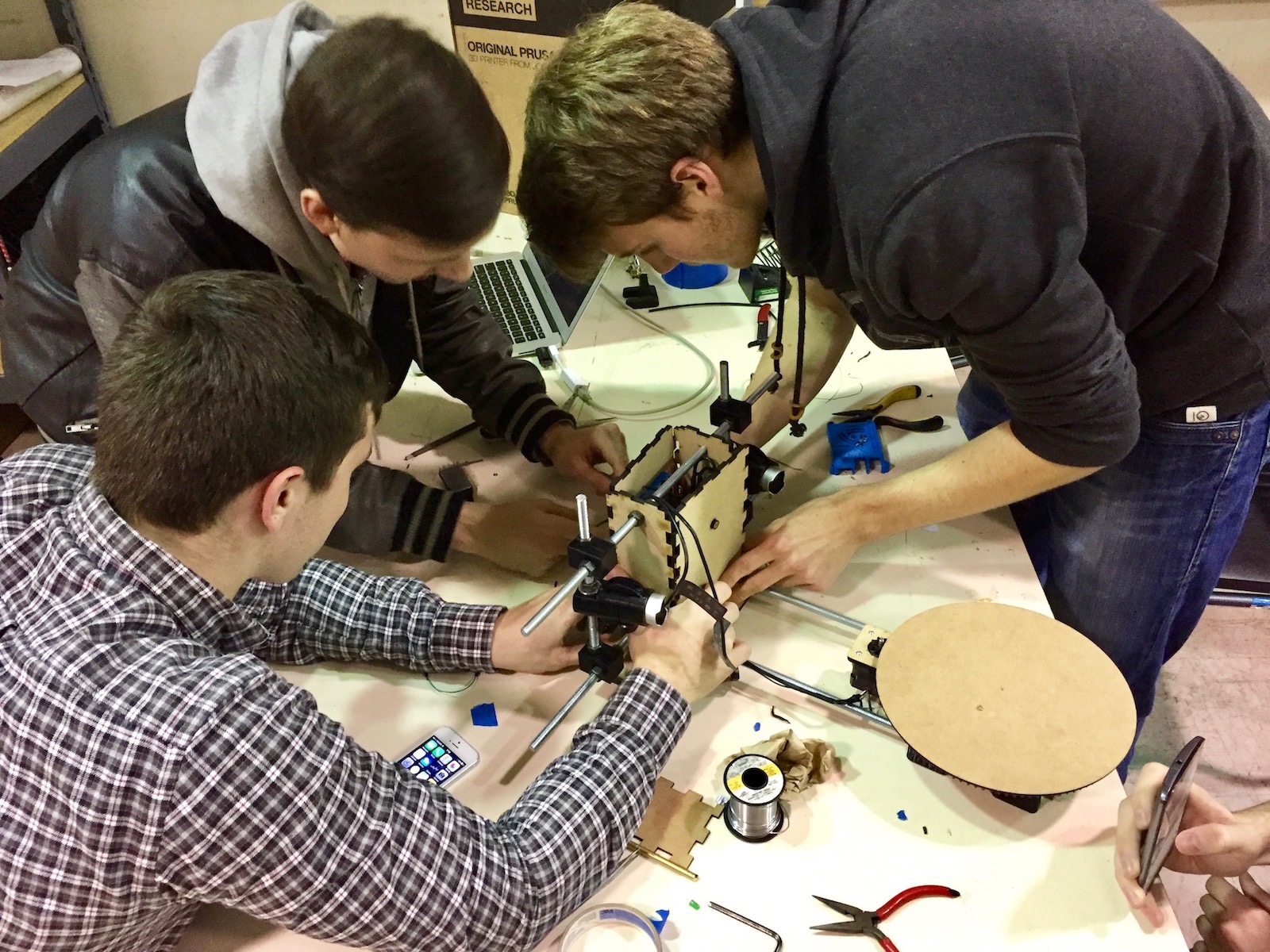

The team working on the scanner. From the left: Jordan Jones, Erik MacLennan, Nolan Heim, Curtis Hubner and me.