The Automated Electric Vehicle Charger (AEVC) is a prototype designed to complete the charging process of an electric vehicle from start to finish, fully autonomously.
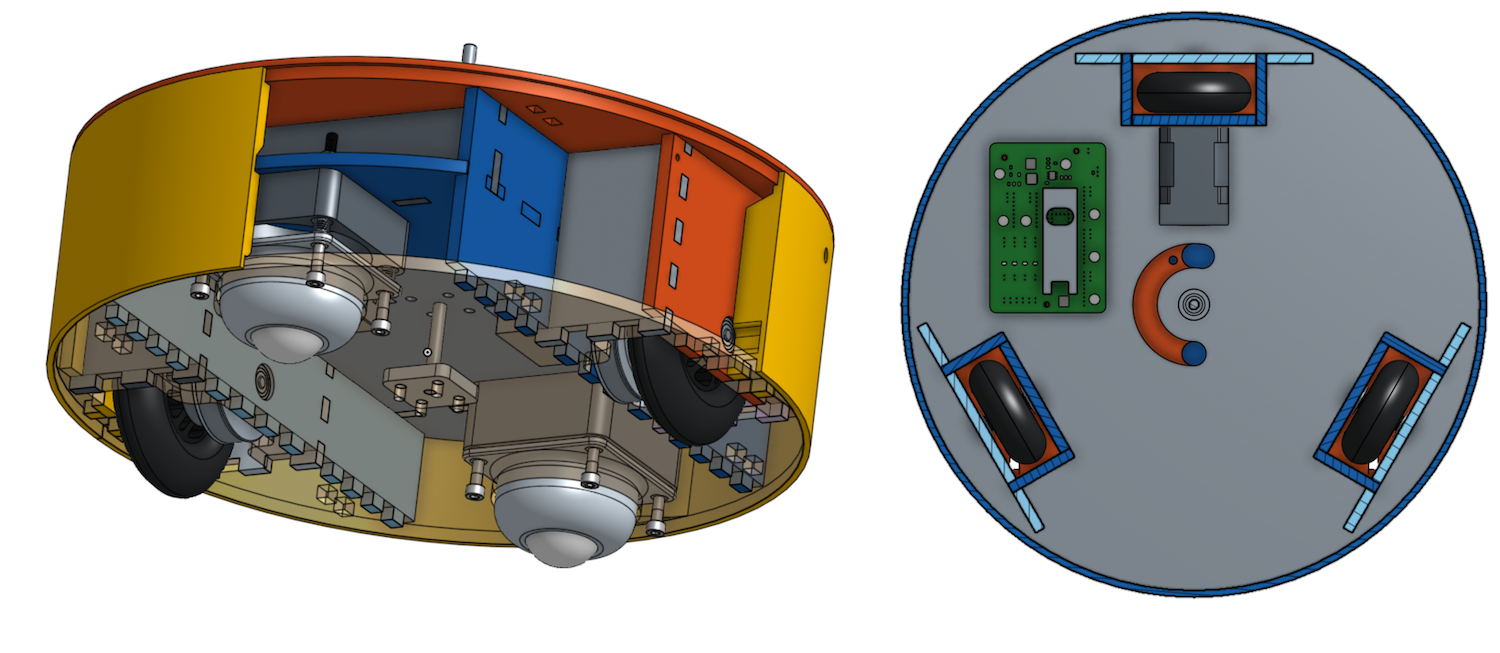
It was designed to navigate environments where EVs are commonly charged, such as household or commercial garages. Using an array of sensors, it aims to detect objects of interest, including obstacles and vehicles to connect to.
We were very happy with how the prototype turned out. It is capable of moving to a specified position with accuracy exceeding 98 percent in all 4 degrees of freedom wihout feedback.